ーヤマト科学の自動化ソリューションー

高精度な作業の実現:各種作業や試験に精通
柔軟な設計:設備品、機器を融合
統合管理による効率化:データの一元管理
お客様の運用に合わせて設計する自動化システムです。GMP・CSVにも対応し、研究開発の効率化と品質向上を両立します。

はじめての自動化導入ナビ(音声付資料)
「自動化は何から始めればいいの?」という方へ、解説動画をご用意しました。アンケートにご回答いただいた方へ視聴URLをお送りします。導入の進め方をご紹介していますので、ぜひご覧ください。
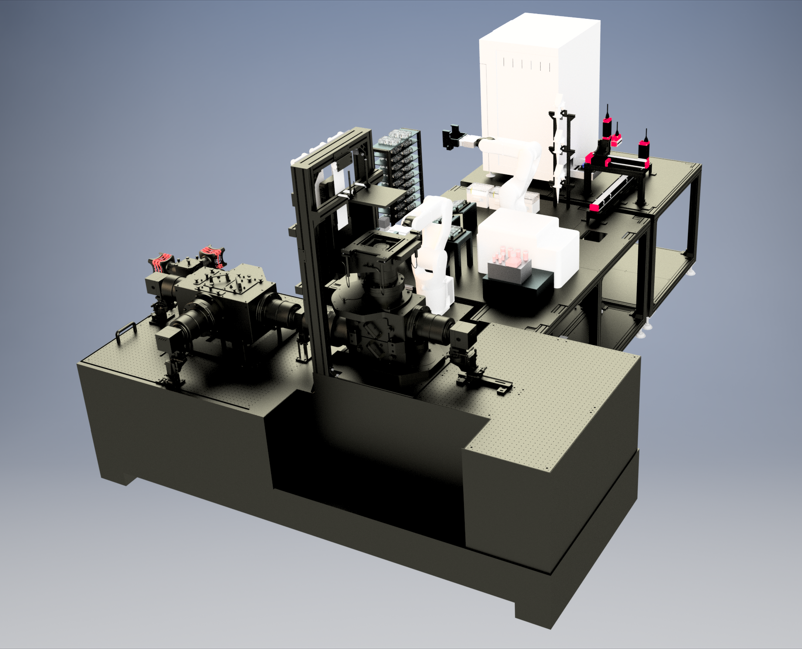
システム例
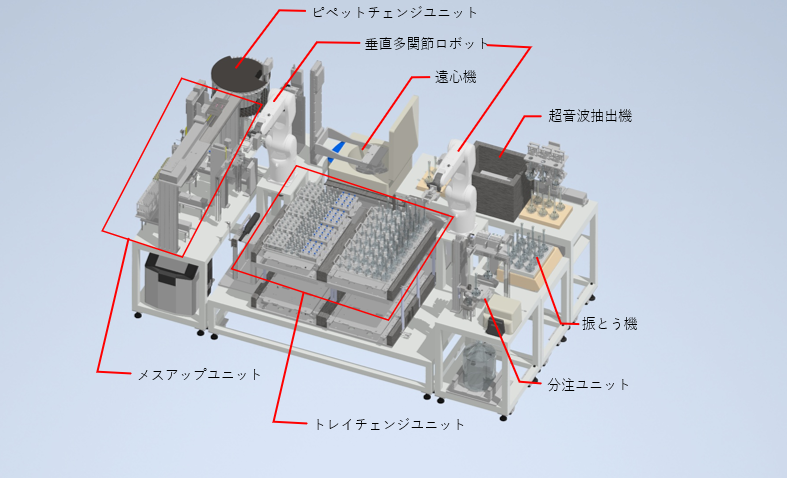
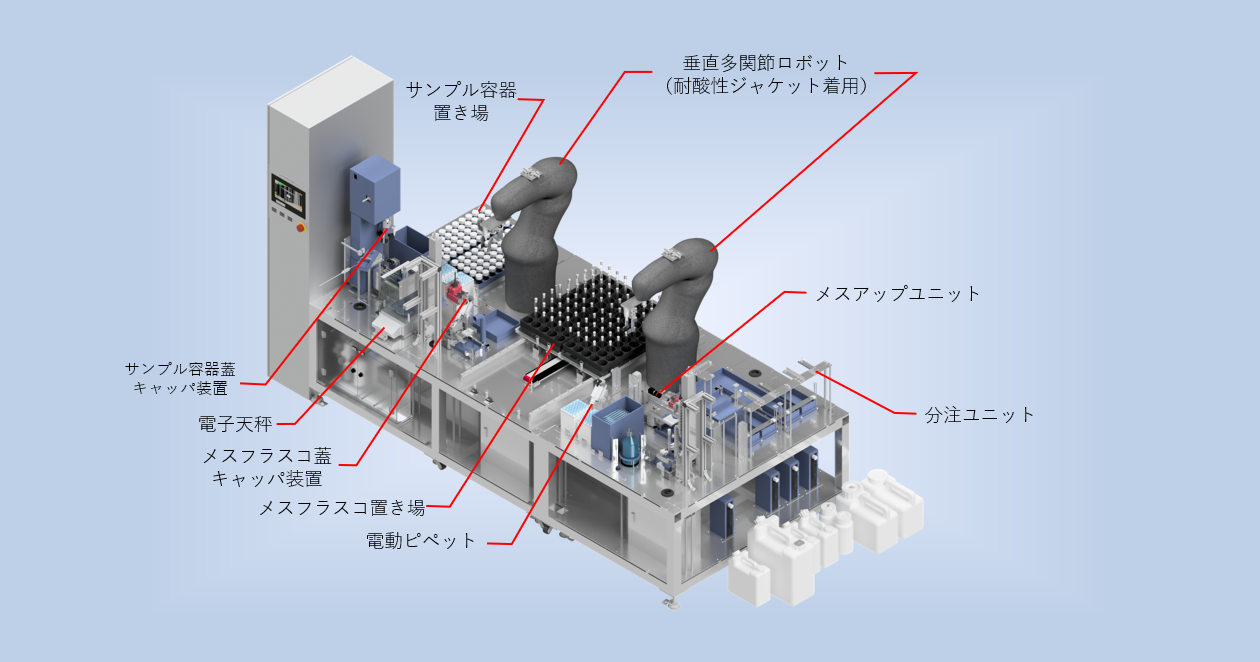
メスフラスコの蓋開け・試薬分注・振とう・超音波処理・メスアップ・混和・印字・分注・遠心・規定量吸引・最終分注まで、HPLC前処理に必要な工程を自動化します。
作業効率の向上・再現性の確保・ヒューマンエラー削減・トレーサビリティ強化を実現し、分析業務の省力化やHPLC前処理 自動化/品質管理の標準化を検討する研究者・製薬企業に最適なソリューションです。(お客様の声)
分析サンプルの前処理工程をフル自動化することで、研究・品質管理の現場が抱える以下の課題をまとめて解決します。希釈作業の再現性のばらつき、標準化されない手作業プロセス、人手不足による省力化ニーズ、ヒューマンエラーの発生リスク、高精度な自動希釈を実現し、分析品質の向上と作業効率化を同時に達成できる次世代ソリューションです。
薬液調合の自動化は多くの引き合いをいただいております。
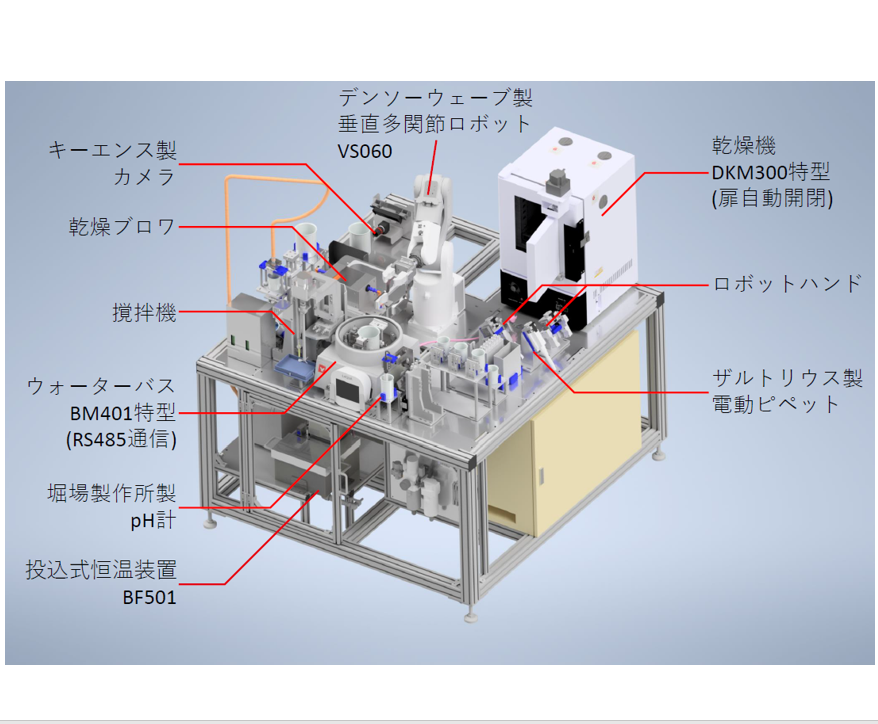
薬液調合・サンプル精製・pH管理・攪拌など、ラボでの手作業工程を全自動化する「薬液調合自動化システム」です。
ロボットが試薬搬送からリアルタイムpH測定、加温、滴下、洗浄、乾燥まで一連のプロセスを安全かつ高再現性で実行します。省人化・品質安定化・ヒューマンエラー削減・DX推進を実現し、研究所・ラボ・製造現場の効率化に大きく貢献します。
各種試験に対応いたします。ご相談ください。
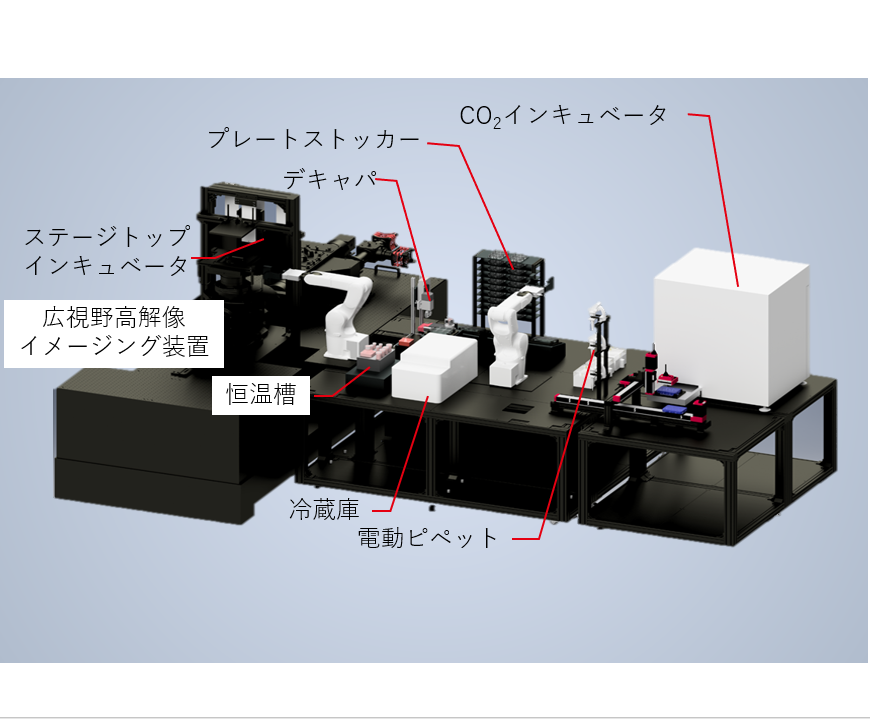
細胞の剥離・細胞数調整・継代・播種を全自動化するシステムです。
ロボットとCO₂インキュベーター、顕微鏡をクリーンブース内で連携させ、培地除去・試薬添加・細胞観察など主要工程を無人で実行します。高再現性・省力化・汚染リスク低減・長時間運転を実現し、細胞培養の標準化やラボ自動化/再生医療・製薬分野の効率化に最適なソリューションです。
事例動画(システム)
事例動画アーカイブ(システム)
事例動画(ユニット)
事例動画アーカイブ(ユニット)
お問合せからご注文までの流れ
(6ヵ月~1年)
- 1
お問い合せ
お問い合わせフォーム、または弊社営業担当・代理店までご連絡ください
- 2
要件・実作業確認
Web会議で要件のヒアリングを行います。必要に応じてNDA締結後、視察または動画で実作業を確認します。
- 3
構想案提示
見積仕様書、レイアウト図、予算見積の提示
- 4
具体化案提示
構想案に基づき仕様・価格・納期を調整し、キー作業の自動化デモを含むPoCを実施します(※一部有償の場合あり)。
ご注文から納品までの流れ
(6ヵ月~1.5年)※部材の調達による
- 1
設計製作
ロボット周辺システムの設計・製作します。
- 2
作業の再現
ロボットティーチングにより作業動作を再現し、お客様の用途に合わせたソフトを構築します。
- 3
立ち合いデモ/
出荷前立ち合い
製作中のシステムについて性能・使い勝手を確認し、仕様との差異や変更点を確認します。バリデーションおよびGMP対応についても対応します。
- 4
納品後
オペレーショントレーニングおよび定期メンテナンスを実施し、保守契約により突発的なエラーにも対応可能です。




ニュース(展示会情報含む)

2026.06.26 セミナー
7月28日に野村コンファレンスプラザ日本橋で開催されるMETTLER TOLEDO様主催の『LAB AND DAY2026』において、自動化の実例とOMINS実験台の紹介をご紹介いたします。皆様のご来場を心よりお待ちしております。
※事前登録(無料)が必要です。
2026.06.11 シンポジウム
7月2~3日に開催のLADEC2026シンポジウム(【ロボット技術】LA現場で使われているロボット技術と将来像)で、ラボオートメーション技術をハードウェアとシステム統合の視点から整理し、進化の方向性や実装要点を具体的事例とともに示し、将来像を考察します。

2026.04.08 動画掲載
自動化粒子径分布測定システム
島津製作所様との協業で粒子径分布測定の前処理から測定までを自動化したシステムを開発しました。
2026.02.06
はじめての自動化導入ナビ
「自動化を進めたいけれど、何から始めればいいかわからない」という声にお応えして、『はじめての自動化導入ナビ』動画を作成しました。
Q&A
- Q
費用はどのくらいですか?見積もりに必要な情報はありますか?
- Q
見積に必要な情報は何ですか?
- Q
ロボットのメーカーや種類に指定はありますか?
- Q
スペースが限られていますが、システムの設置は可能でしょうか?
- Q
メンテナンスは必要ですか?
- Q
現在使用中の計測機器は、システムに組み込み可能ですか?
- Q
PoCとは何ですか?PoCのみの依頼はできますか?
- Q
GMP、CSV対応のバリデーションはできますか?
- Q
DI(データインテグリティ)に対応していますか?
- Q
NDAは締結可能ですか?